
 22
22
近日,大连海事大学徐敏义教授团队针对如何精准控制水下爪夹抓取力的问题,提出了一种用于水下机器人爪夹的基于液态金属型摩擦纳米发电机的三维触觉掌心传感器(adistributed liquid metal-based three-dimensional biomimetic underwater triboelectric palm-like tactile sensor ,下称UPTS)。该传感器由柔性盖,5个独立的传感单元,柔性支撑以及3D打印的固定壳体组成,本文开展了关于UPTS的陆上和水下实验,其中陆上实验的结果表明UPTS能准确识别外力的大小、方向和作用面积,定位精度在5度以内,即使在高频接触的场景中也能保持稳定。水下实验的结果表明UPTS可以在水中区分物体的硬度和形状,对实验用的3种硬度的材质区分准确率达到100%,对4种形状的区分准确率高达99.75%。实验结果表明,在一定范围内UPTS不仅可以实时监测爪夹抓力大小,还能有效的分辨出被抓物体的硬度和形状,这对于爪夹的抓取功能具有重要意义,为海洋科学研究提供更精准的数据支持。
图文导读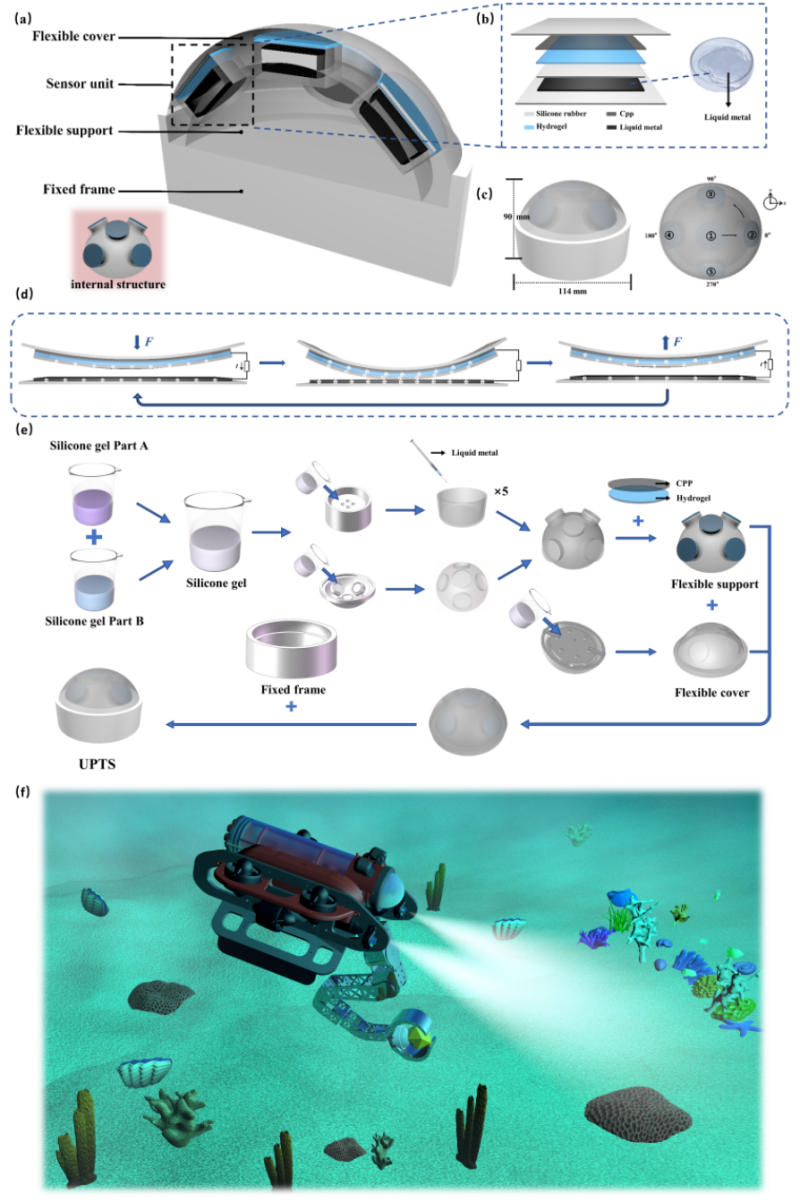 图1:UPTS基本结构与工作机理。
图1:UPTS基本结构与工作机理。
(a)UPTS剖面图;(b)传感单元详细结构图;(c)UPTS主视图及俯视图;(d)传感单元工作原理示意图;(e)UPTS制作步骤;(f)UPTS在水下自主目标抓取中的应用。
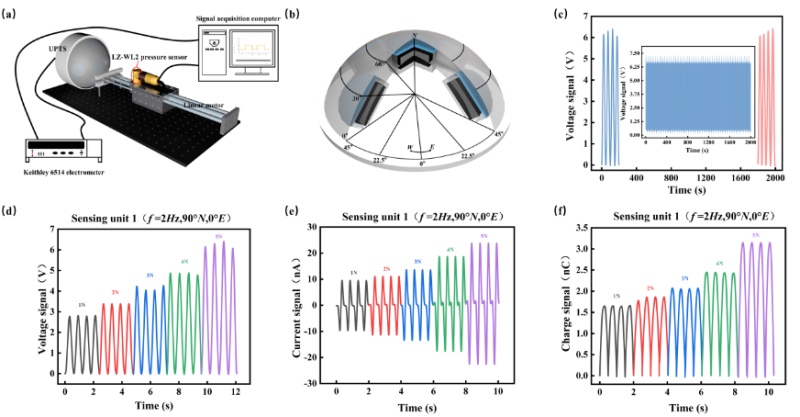 图2:UPTS陆上实验台及负载测试。(a) UPTS陆上实验台;(b)柔性盖表面经纬线标注;(c)UPTS半小时耐久性试验;(d)外加负载大小从1N到5N的开路电压;(e)外加负载大小从1N到5N的短路电流;(f)外加负载大小从1N到5N的短路电荷。
图2:UPTS陆上实验台及负载测试。(a) UPTS陆上实验台;(b)柔性盖表面经纬线标注;(c)UPTS半小时耐久性试验;(d)外加负载大小从1N到5N的开路电压;(e)外加负载大小从1N到5N的短路电流;(f)外加负载大小从1N到5N的短路电荷。 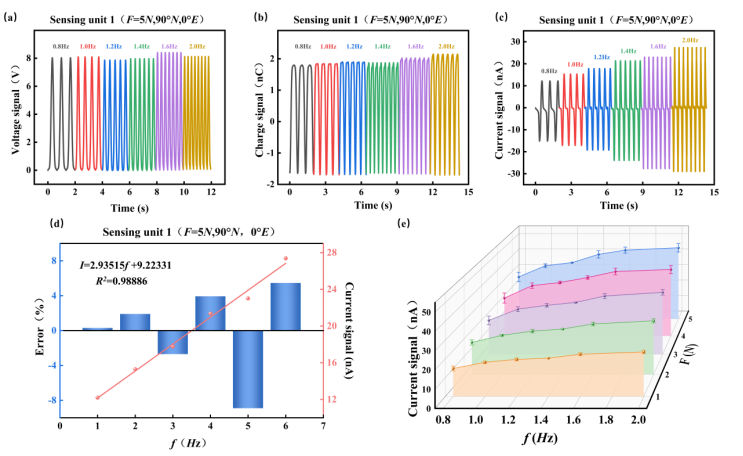
图3 :UPTS的输出特性。(a)外加5N负载0.8Hz~2Hz下的开路电压;(b)外加5N负载0.8Hz~2Hz下的短路电荷;(c)外加5N负载0.8Hz~2Hz下的短路电流;(d)碰撞频率与电流的线性关系;(e) UPTS的输出电流、负载压力与碰撞频率之间的关系。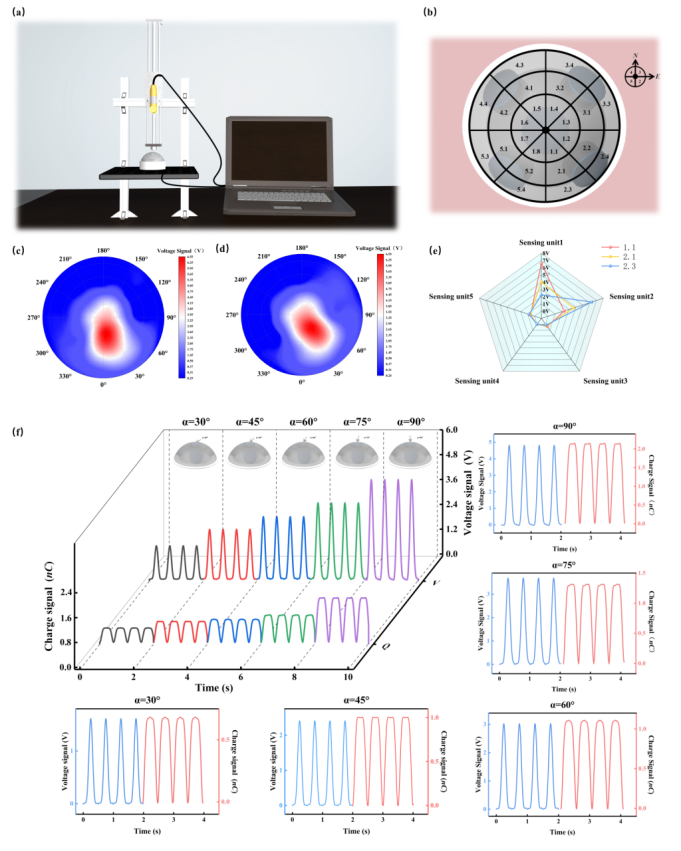
图4:UPTS在动态载荷定位中的应用;。(a) UPTS方位角及攻角试验台;(b) UPTS上表面区域划分;(c) UPTS在1.1区域模拟时的电压应力图;(d) UPTS在1.2区域模拟时的电压应力图;(e) UPTS传感单元在1.1、2.1和2.3区域模拟时的电压信号雷达图;(f) UPTS在不同攻角下的电压和电荷图。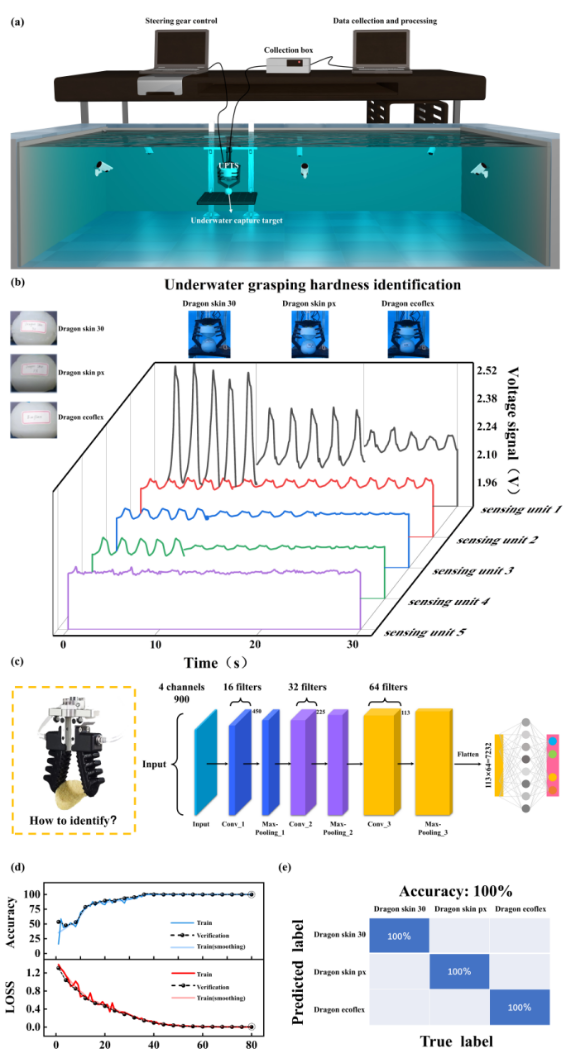
图5:UPTS水下试验台及硬度识别。(a)水下物体硬度识别实验平台;(b)不同硬度条件下UPTS五个传感单元的输出电压图;(c)卷积神经网络训练模型的详细结构;(d)训练进度和损失图;(e)硬度识别混淆矩阵。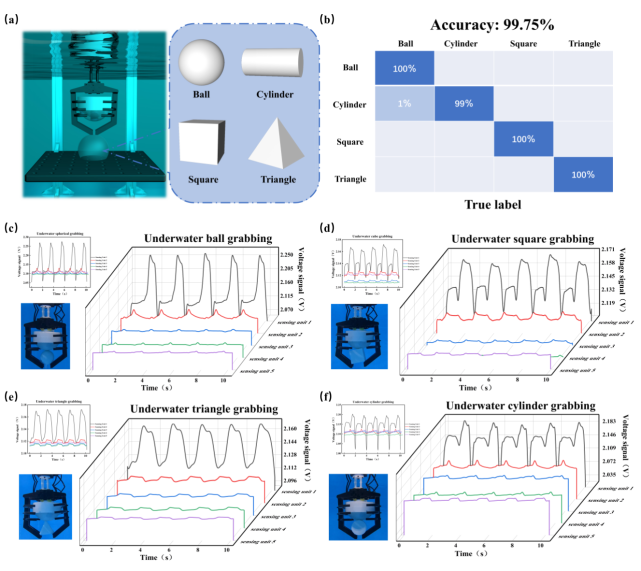
图6:UPTS物体形状识别。(a) UPTS水下物体形状识别实验平台;(b) 形状识别混淆矩阵;(c) UPTS水下球形抓取时电压输出信号图;(d) UPTS水下立方体抓取时电压输出信号图;(e) UPTS水下三角形抓取时电压输出信号图;(f) UPTS水下圆柱体抓取时电压输出信号图。




长按屏幕识别二维码
打开手机扫描二维码